
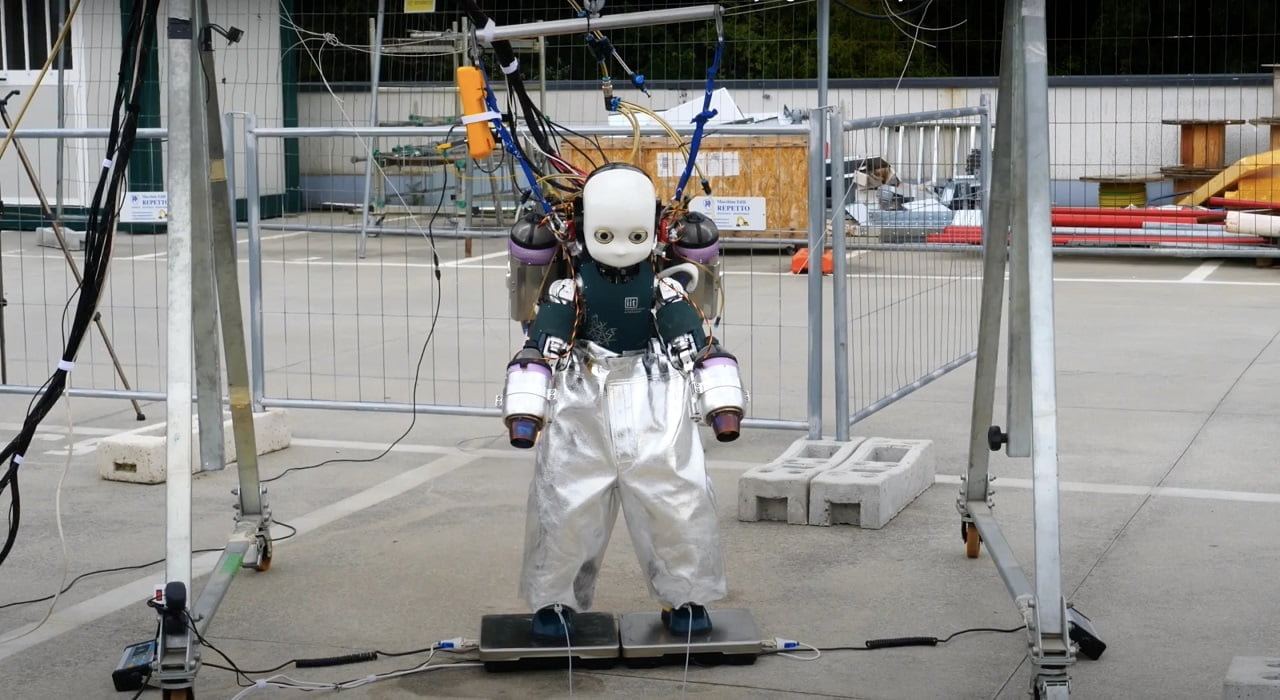
Mogłoby się wydawać, że przemieszczanie robotów jest banalnie proste: wystarczy dać im koła, gąsienice, lub wirniki. Gorzej sprawy się mają kiedy ktoś uprze się na zbudowanie humanoidalnej maszyny — w tym przypadku o twarzy, która mogłaby przyprawić o kompleksy twórców kostiumów do horrorów. Takim uparciuchem okazał się Daniele Pucci, szef laboratorium sztucznej i mechanicznej inteligencji we Włoskim Instytucie Technologii, który zdecydował się na śmiały krok, jakim było połączenie robota iRonCub z plecakiem odrzutowym.
Robot z JetPackiem
Zespół Pucciego wierzy, że takie systemy mogłyby pewnego dnia działać jako pierwsze jednostki reagujące na około 300 katastrof naturalnych, które rocznie zabijają około 90 tysięcy osób na całym świecie. Przyznam jednak, że nie do końca wiem w jaki sposób maszyna o twarzy upiornego dziecka z silnikami odrzutowymi, zamiast dłoni mogłaby komuś pomóc. Gdyby ktoś przyjął od niej pomocną dłoń, to raczej straciłby swoją wraz z całym ramieniem. Warto tu jednak przytoczyć argumenty stojące za tą konstrukcją, o których mówią twórcy:
Aerial Humanoid Robotics łączy manipulację z powietrza i robotykę humanoidalną. Dzięki temu lotnicze roboty humanoidalne przezwyciężają brak możliwości lokomocji naziemnej manipulatorów powietrznych i rozszerzają możliwości lokomocji robotów humanoidalnych na przypadek lotu. Aerial humanoidalne roboty mogą następnie chodzić, latać, manipulować i transportować obiekty, oferując w ten sposób energetycznie wydajne rozwiązania do transportu ładunków i manipulacji obiektami.
Zobacz też: Oppo wyprodukuje własny procesor – nie będzie to jednak SoC
Twórcy wyjaśniają także, dlaczego ich robot jest lepszy od klasycznych dronów:
Aerial humanoidalna robotyka rozszerza manipulację lotniczą na bardziej solidny i energooszczędny poziom. W rzeczywistości manipulacja powietrzna jest często egzemplifikowana przez quadrotory wyposażone w robotyczne ramię. Roboty te nie mogą poruszać się za pomocą sił kontaktowych z otoczeniem i często zmagają się z lataniem w wietrznym otoczeniu podczas manipulowania obiektem, co wymaga precyzyjnej kontroli pozycji w celu wykonania zadań manipulacyjnych. Tak więc dodatkowa ręka latającego robota humanoidalnego mogłaby ustanowić punkt kontaktowy między robotem a otoczeniem, dzięki czemu kontrola pozycji robota byłaby prostsza i bardziej wytrzymała.
Zastanawiam się tylko, czy nie dałoby się stworzyć drona z ramieniem, który manipulował by obiektami po tym, jakby wylądował na np. rozkładanych nogach?
Źródło: Engadget